




Робот-манипулятор механическая рука meArm
Код товара: ENS-00924
 |
|
|
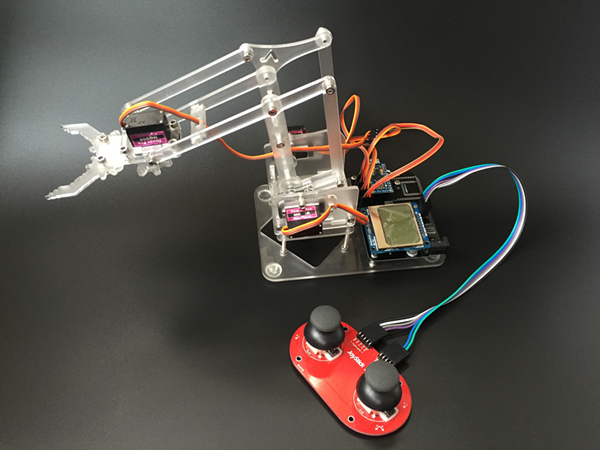
Робот-манипулятор механическая рука
Робот-манипулятор MeArm — карманная версия промышленного манипулятора. MeArm - простой в сборке и управлении робот, механическая рука. Манипулятор имеет четыре степени свободы, что позволяет легко захватывать и перемещать различные небольшие предметы.
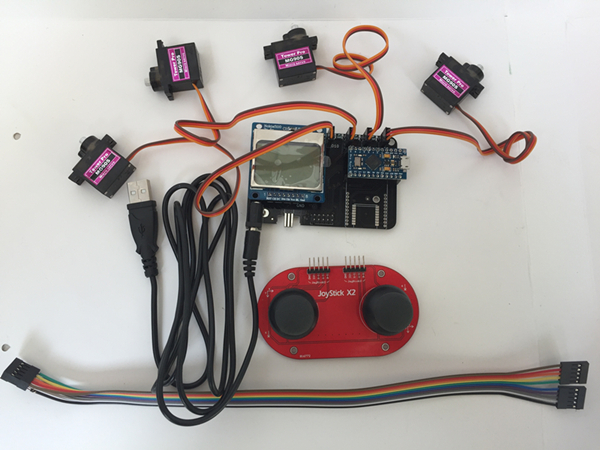
Данный товар представлен в виде набора для сборки. Включает в себя следующие части:
Робот-манипулятор MeArm — карманная версия промышленного манипулятора. MeArm - простой в сборке и управлении робот, механическая рука. Манипулятор имеет четыре степени свободы, что позволяет легко захватывать и перемещать различные небольшие предметы.
Данный товар представлен в виде набора для сборки. Включает в себя следующие части:
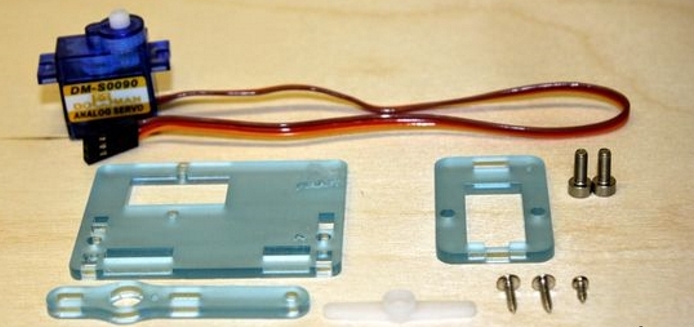
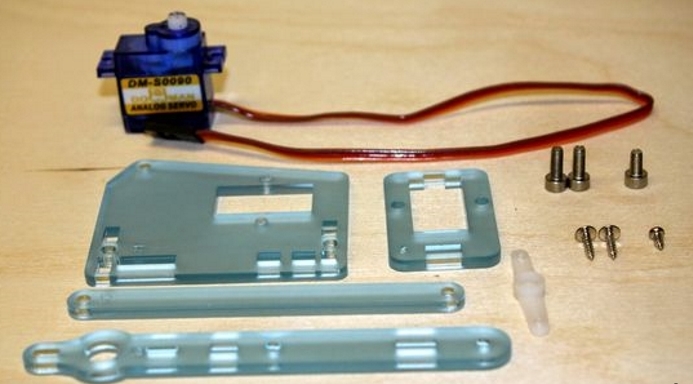
- набор деталей из прозрачного акрила для сборки механического манипулятора;
- 4 сервопривода;
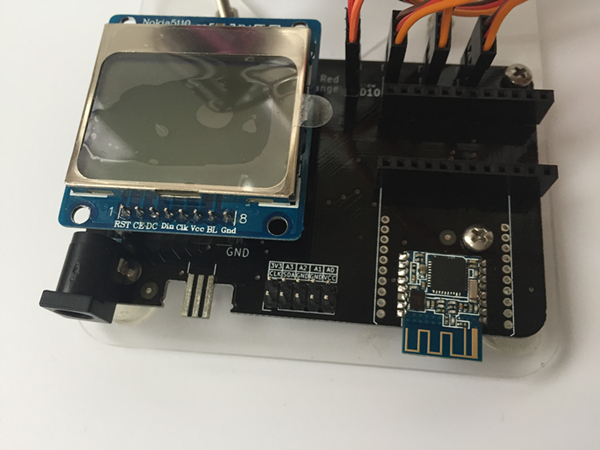
- плата управления, на которой расположен микроконтроллер Arduino Pro micro и графический дисплей Nokia 5110;
- плата джойстиков, содержащая два двухкоординатных аналоговых джойстика;
- USB кабель питания.
Перед сборкой механического манипулятора необходимо произвести калибровку сервоприводов. Для калибровки будем использовать контроллер Arduino. Подсоединяем сервоприводы к плате Arduino (необходим внешний источник питания 5-6В 2А).
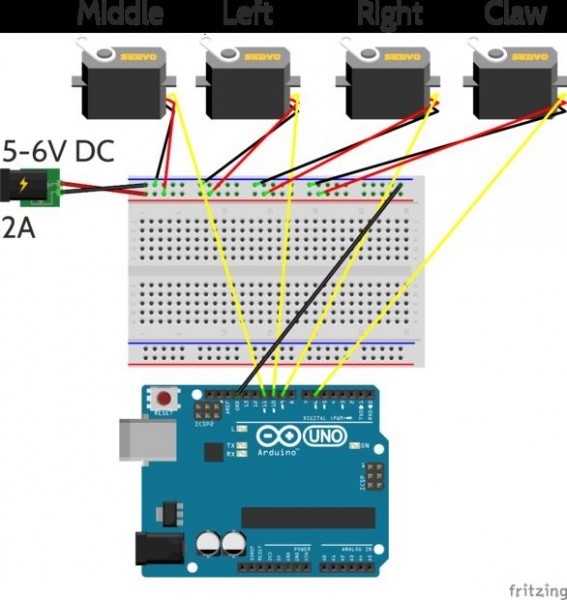
Загружаем на плату Arduinoскетч.
#include
Servo middle, left, right, claw ; // создание 4 объектов Servo
void setup()
{
Serial.begin(9600);
middle.attach(11); // присоединяет серво на контакт 11 на вращение платформы
left.attach(10); // присоединяет серво на контакт 10 на левое плечо
right.attach(9); // присоединяет серво на контакт 11 на правое плечо
claw.attach(6); // присоединяет серво на контакт 6 claw (захват)
}
void loop()
{
// устанавливает позицию сервопривода по величине(в градусах)
middle.write(90);
left.write(90);
right.write(90);
claw.write(25);
delay(300);
}
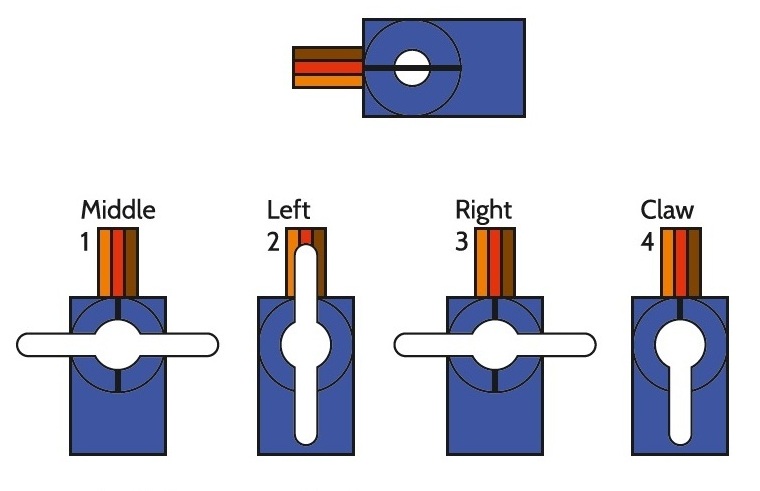
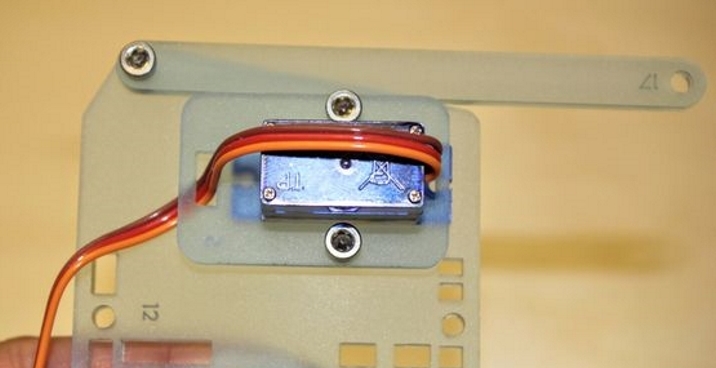
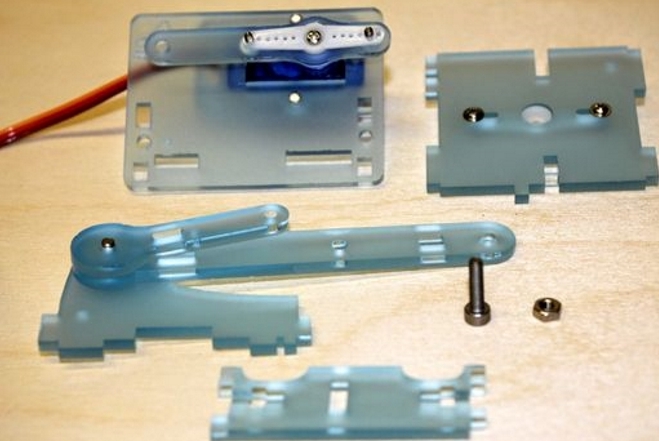
Используя маркер, сделайте линию через корпус серводвигателя и шпиндель. Подключите пластмассовую качалку из комплекта к сервоприводу, как показано ниже с помощью небольшого винта из комплекта креплений к сервоприводу. Мы будем использовать их в этом положении при сборке механической части MeArm. Будьте осторожны, чтобы не переместить положение шпинделя.
Теперь можно производить сборку механического манипулятора.
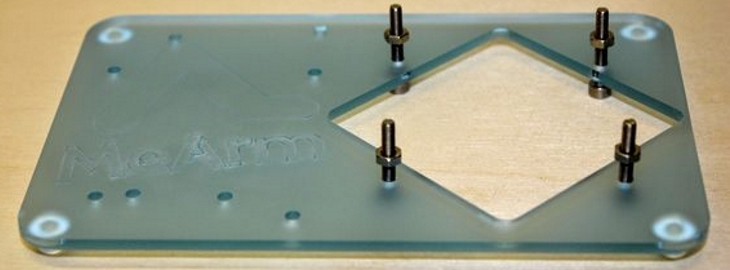
Возьмём основание и прикрепим ножки к её углам. Затем установим четыре 20 мм болта и накрутим на них гайки (половину от общей длины).
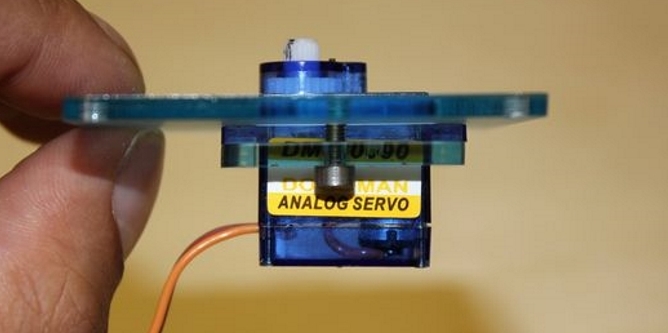
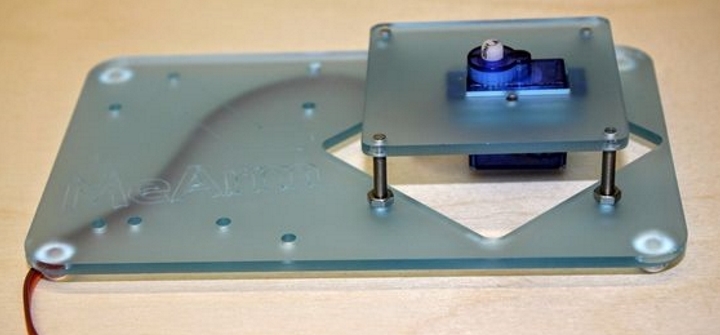
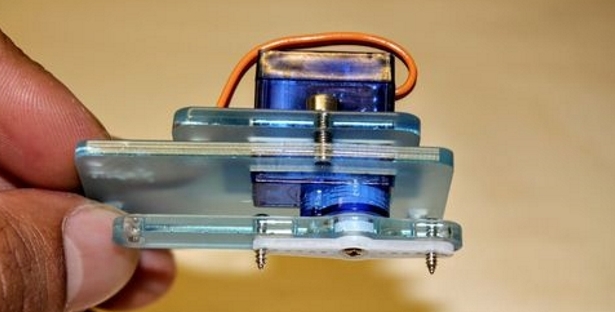
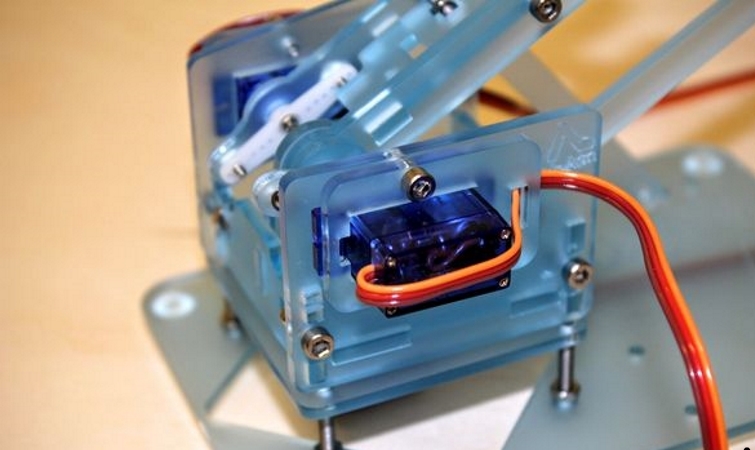
Теперь крепим центральный сервопривод двумя 8-мм болтами к маленькой пластине, и получившуюся конструкцию крепим к основанию с помощью 20 мм болтов.
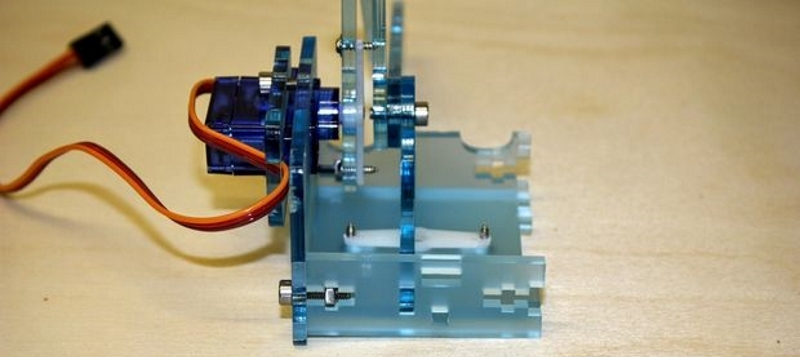
Собираем левую секцию конструкции.
Собираем правую секцию конструкции.
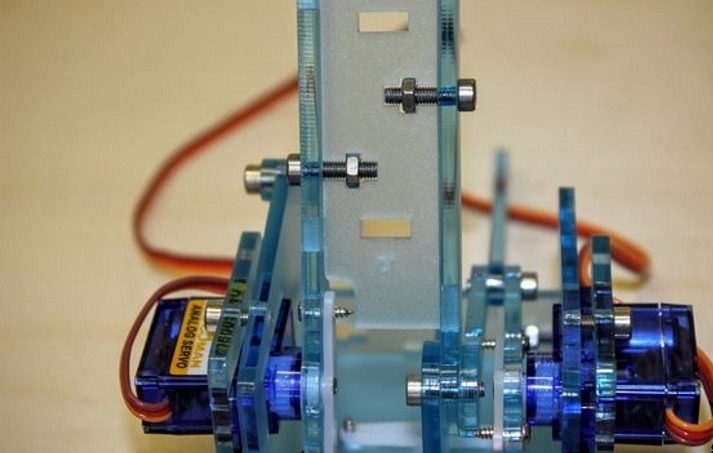
Теперь необходимо соединить левую и правую секции. Сначала леую к переходной пластине
Потом правую, и получаем
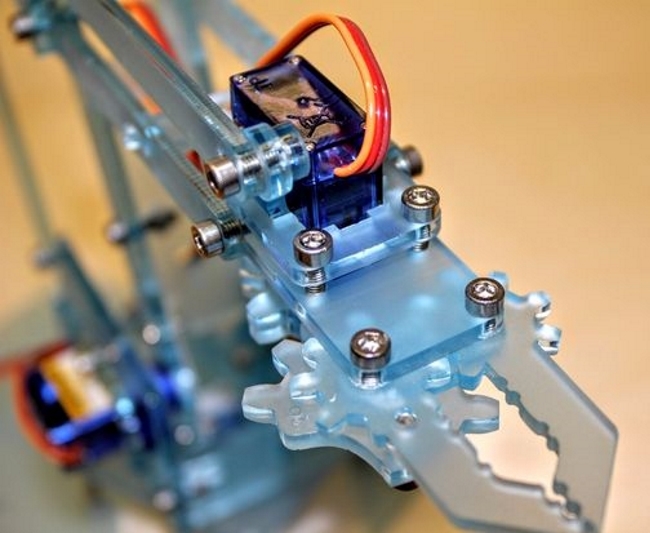
Подсоединяем конструкцию к платформе
И собираем "клешню"
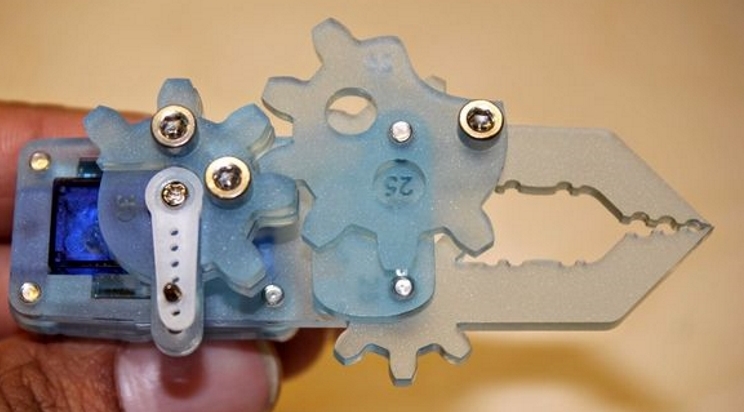
Крепим "клешню"
Для сборки можно использовать следующееруководство(на англ. языке) илируководство по сборке подобного манипулятора(на русском).
Схема расположения выводов
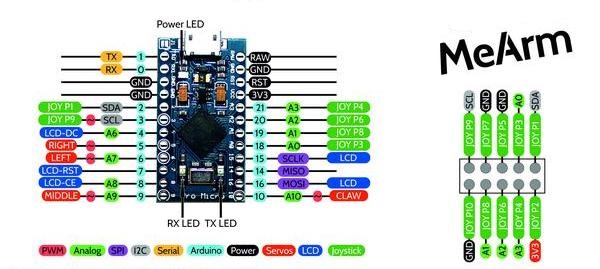
Теперь можно приступать к написанию Arduino кода. Для управления манипуляторм, наряду с возможностью управления управления с помощью джойстика, было бы неплохо направлять манипулятор в какую-то определенную точку декартовых координат (x, y, z). Есть соответствующая библиотека, которую можно скачать с github –https://github.com/mimeindustries/MeArm/tree/master/Code/Arduino/BobStonesArduinoCode.
Координаты измеряются в мм от центра вращения.Исходное положение находится в точке (0, 100, 50), то есть 100 мм вперед от основания и 50 мм от земли.
Пример использования библиотеки для установки манипулятора в определенной точке декартовых координат:
#include "meArm.h"
#include
meArm arm;
void setup() {
arm.begin(11, 10, 9, 6);
arm.openGripper();
}
void loop() {
// вверх и влево
arm.gotoPoint(-80,100,140);
// захватить
arm.closeGripper();
// вниз, вред и вправо
arm.gotoPoint(70,200,10);
// отпустить захват
arm.openGripper();
// вернуться вт начальную точку
arm.gotoPoint(0,100,50);
}
Методы класса meArm:
voidbegin(intpinBase,intpinShoulder,intpinElbow,intpinGripper)– запуск meArm, указываются пины подключения для сервоприводов middle, left, right, claw. Необходимо вызвать в setup();
voidopenGripper()– открыть захват;
voidcloseGripper()– захватить;
voidgotoPoint(floatx,floaty,floatz)– переместить манипулятор в позицию декартовых координат (x, y, z);
floatgetX()– текущая координата X;
floatgetY()– текущая координата Y;
floatgetZ()– текущая координата Z.
Руководство по сборке (англ.)PDF
Техническое описание (рус.)PDF
------------------
УТЫ-00924:5000



