




Модель левой руки робота механическая, 5 степеней свободы, собрана
Код товара: CTTL12768 Есть в наличии
Есть в наличии| 12910 c |
| 12910 c |

 |
|
|




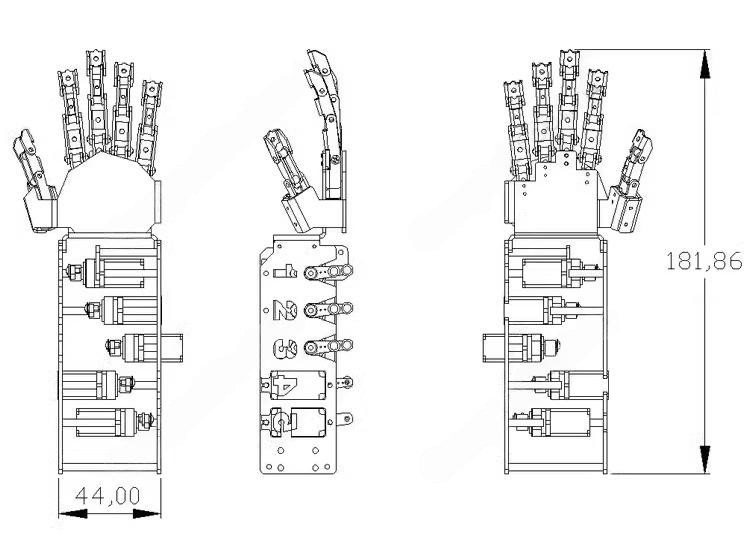
Модель электромеханической руки робота с 5-ю бионическими пальцами позволяет роботу воспроизводить основное хватательное движение, выполняемое человеческой ладонью, очень похожее на настоящее. Конструкция руки выполнена из 1-миллиметрового алюминия и рассчитана на взаимодействие с исключительно малогабаритными и легковесными объектами. Роботизированная рука обладает свойством "мягкого" захвата предметов. Механизм работы сухожилия для каждого отдельного пальца основан на гибкой сцепке из трёх составных фалангов, приводимой в движение индивидуальным сервоприводом. Все 5 пальцев кисти способны двигаться независимо друг от друга. Они могут сгибаться и разгибаться под любым доступным углом.
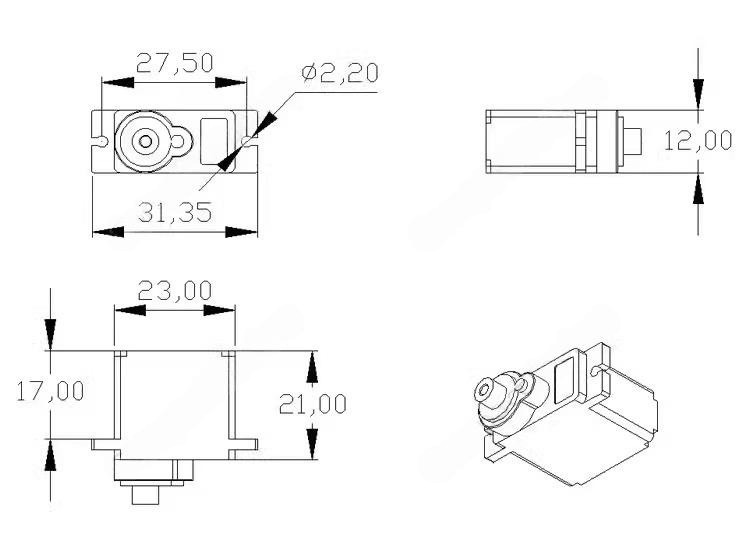
Применяются маломощные сервоприводы модели GS-9018C с динамическими характеристиками, близкими к широко известным, бюджетным моторам SG90. Один серво функционирует от напряжением 4.8-6 вольт и потребляет ток 150-400мА (прямо зависит от физической нагрузки). В сумме 5 задейстованных машинок могут расходовать до 2А. Питание серво желательно организовать от совместимого внешнего источника электроэнергии. Исходное положение пальца регулируется винтовым зажимом на валу GS-9018C, предварительно установленного в стартовый угол 90°.
Управление манипулятором осуществляется специализированным цифро-аналоговым оборудованием, программное обеспечение которого поддерживает функцию генерации ШИМ-сигнала определённой длины. В качестве системы управления могут эксплуатироваться готовые или самостоятельно изготовленные решения, построенные на популярных 5-вольтовых AVR-контроллерах для платформы Ардуино или на 3.3-вольтовых чипах семейства PIC/STM/ESP и др. Управление сервомотором в среде программирования Arduino IDE демонстрируется простой и удобной библиотекой "Servo". В паре с программируемым контроллером Arduino UNO и его 6-ю аналоговыми входами АЦП будет удобно использовать готовую универсальную плату расширения многоканального управления серво моторами. А добавление в схему дополнительных блоков беспроводной связи WiFi или Bluetooth сделает возможным управление роботизированной рукой-захватом на расстоянии, с помощью мобильного устройства или самодельного джойстика.
Технические характеристики
Чертежи
  |
Документация
- Пошаговая инструкция по сборке механизма руки робота с 5 бионическими пальцами (кит.PDF);
------------------
СЕЕД12768:12910
Доставка может производиться различными по Вашему выбору способами. Это и самовывоз, и курьерские службы по г. Москве, и транспортные компании по России. Также мы можем выслать этот товар Почтой России. Если размеры, вес товара Модель левой руки робота механическая, 5 степеней свободы, собрана или соображения удароустойчивости находятся в разрешённых Почтой России пределах.