




Танк UGV02 WaveShare Шасси мобильного робота 6-колесное 4WD
Код товара: CTTL16333
 |
|
|




Технические характеристики
Комплектация
Прочное полноприводное шестиколёсное шасси с цельнометаллическим корпусом UGV02 от Waveshare позволяет создавать компактных и быстрых мобильных роботов с компьютерным разумом под управлением цифровой программируемой платформы Raspberry Pi/Zero, NVidia Jetson Nano/Orin Nano, Horizon Sunrise X3 PI и др. Корпус выполнен из 2-мм листового алюминиевого сплава марки 5052, надёжно защищает внутренне содержание в процессе использования. Конструкция шасси UGV02 отличается превосходной проходимостью по бездорожью и прекрасными амортизирующими характеристиками. Четыре мощных ведущих мотора-редуктора JGV37-520 с высококачественными металлическими шестерёнчатыми механизмами в паре с ещё двумя дополнительными колёсами позволяют мобильному роботу двигаться со скоростью от 0.05 до 0.41 метра в секунду, и нести на себе до 4 килограмм полезного груза. Гибкие резиновые шины, установленные на колёсах UGV02, отлично снижают силу удара об поверхность при движении по сложной местности, обеспечивают хорошую амортизацию на участках с природным или искусственным бездорожьем.
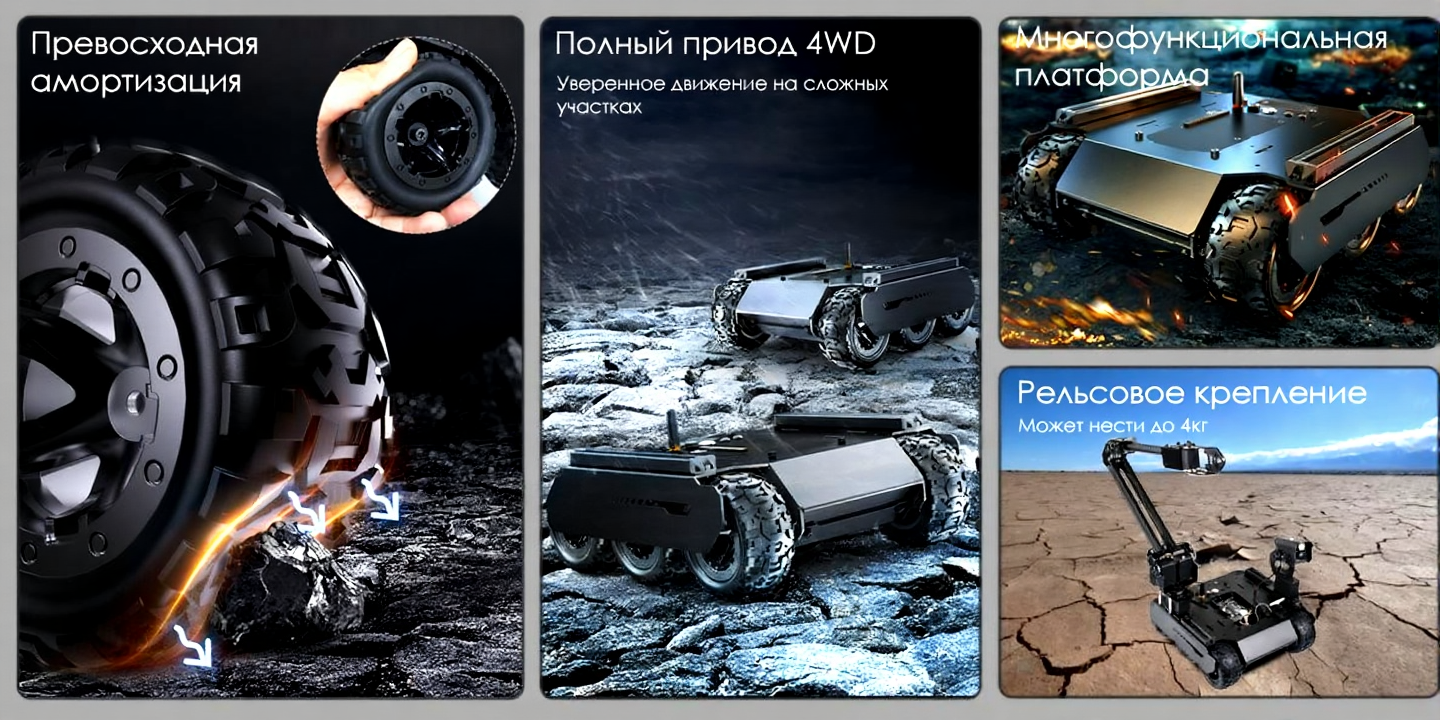 |
Модель шасси UGV02 4WD Chassis комплектуется многофункциональным управляющим драйвером на чипе ESP32. Связь между платой драйвера и хост-контроллером выстраивается на интегрированных в ESP32 интерфейсах беспроводной связи WiFi с настраиваемыми режимами точка доступа/клиент и Bluetooth. Кроме того, представлена опция проводной последовательной коммуникации. Периферия драйвера UGV02 включает в себя 0,91" OLED-экран для вывода информации, 9-осевой инерционный измерительный блок (IMU) для точной трёхмерной ориентации в пространстве, слот карты памяти, датчик температуры и другие функции. Плата драйвера поддерживает управление серво-моторами с последовательной шиной от панорамной камеры, имеет шину USB-UART для подключения лидара — сканера окружения, может генерировать выходной ШИМ-сигнал (камера и лидар не входят в комплектацию). Ручное управление шасси UGV02 с функцией вывода данных блока IMU реализовано отображением страницы графического интерфейса через WEB-браузер на любом мобильном устройстве: смартфоне, планшете и т.д. Все библиотеки с исходным кодом для шасси UGV02 полностью открыты для дальнейшей разработки и доступны к загрузке.
Шасси UGV02 4WD Chassis полноценно работает от 3 литиевых аккумуляторов 18650, устанавливаемых в отсек держателя последовательно (элементы 18650 не входят в комплект). За исправное состояние батареи и бесперебойное питание электроники отвечает встроенный модуль заряда/разряда UPS с функцией мониторинга напряжения на чипе INA219. Система питания шасси UGV02 содержит защиту батареи от реверсивного расположения её полюсов в виде светодиодной индикации. Мобильный робот заряжается от 12-вольтового зарядного устройства через специальный разъём, расположенный на корпусе. Рядом с разъёмом питания выведены WiFi-антенна от модуля ESP32. Тут же встроена кнопка включения питания драйвера и моторов. Дополнительно присутствуют порты зарезервированного интерфейса для установки WiFi-антенны от хост-контроллера.
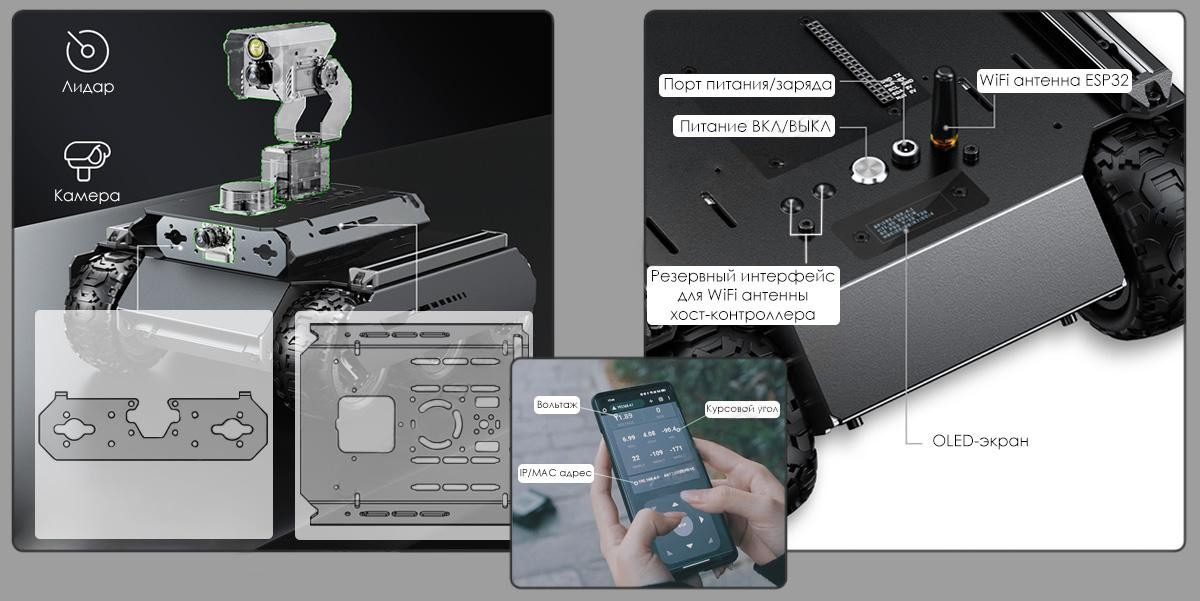 |
Обратите внимание! Фронтальная камера, поворотно-наклонная камера, Серво моторы и Лидар не входят в комплектацию шасси UGV02 4WD Chassis Waveshare.
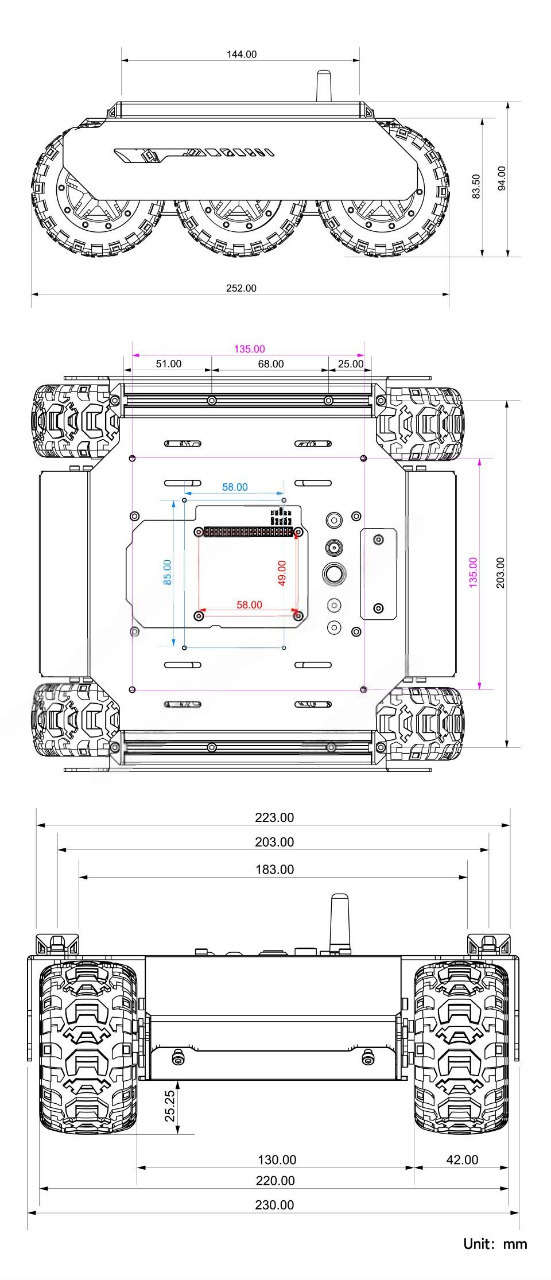
Физические размеры, мм
 |
Документация и ПО
- Руководство пользователя, исходники программ и загружаемые ресурсы (web-страница проекта);
------------------
СЕЕД16333:22930